ABOUT THE SYSTEM
Key features of our system
High-Resolution Analysis
High Robustness
High Accuracy
Large-Scale Image Analytics
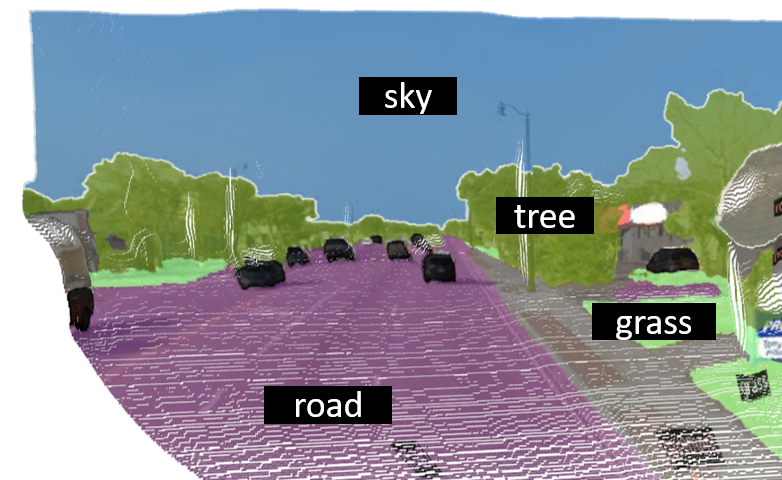
Semantic Segmentation
Depth Estimation
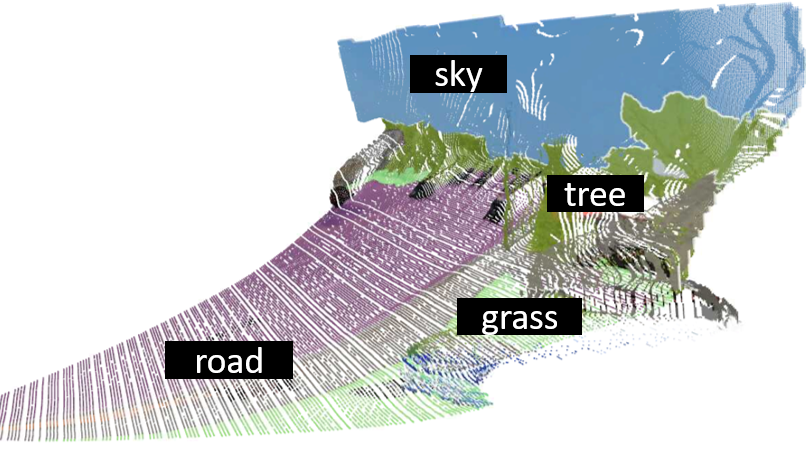
3D Driving Environment Estimation
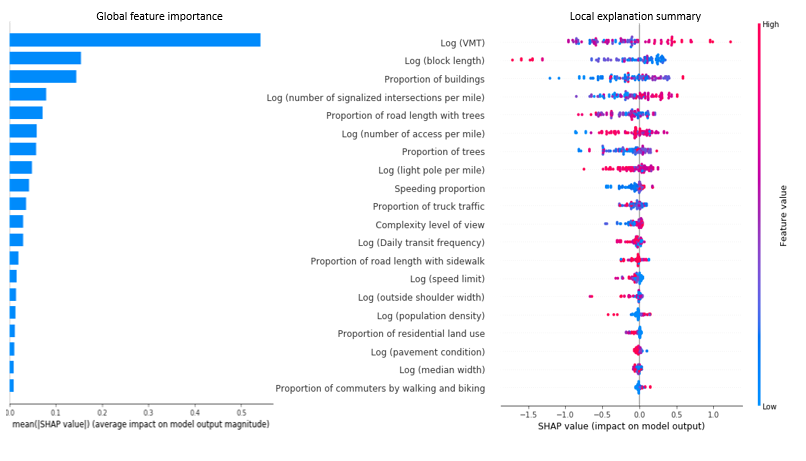
Fusion of Deep Learning Detection and Explainable Machine Learning
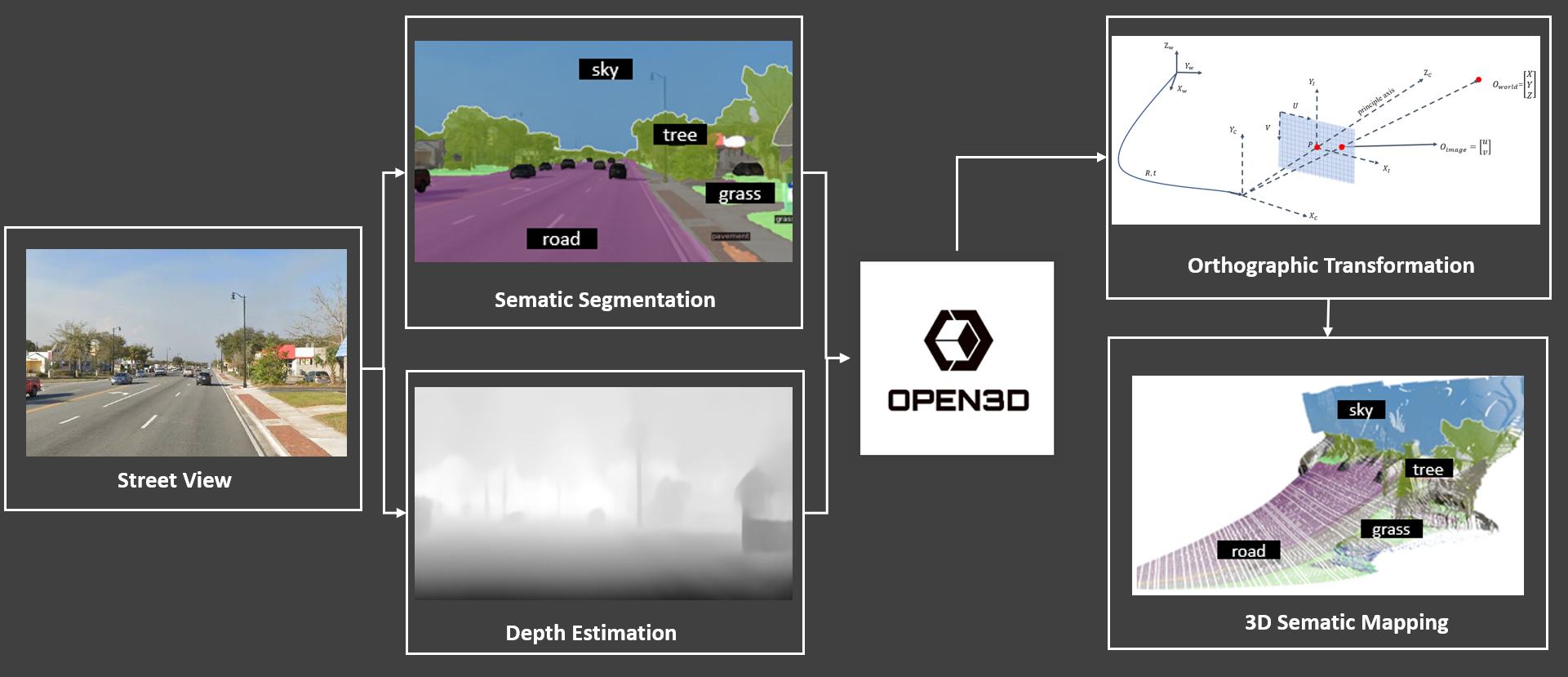
System Overview
This system, is to extract and understand driving visual environment along roads by using street view images (e.g., Google Street View Panorama) and videos from cameras on vehicles. Semantic segmentation and depth estimation are conducted first to get the clustering and depth information at each pixel in images or videos. Then, the orthographic transformation is applied to transfer the 2D images to 3D images, which reflect driving visual view in the real world. Based on the proposed system, the following information could be generated from street view images and videos:
- Surrounding environments such as trees, buildings, signs, and driving complexity levels
- Safety blind spots for human-driving and automated vehicles
- Urban feature composition and urban greenery
- Walking environment for pedestrians and cycling environment for bicyclists
The system can be applied for images and videos at the street-level which are collected at different types of road facilities, such as freeways, arterials, intersections, bike lanes, and sidewalks
Miles Roads
Street View Images
publication
Funded Projects
THE TEAM
The ones who makes this happen
Dr. Mohamed Abdel-Aty
P.E., F.ASCE Trustee Chair

Dr. Yina Wu
Research Associate Professor
Dr. Qing Cai
Research Assistant Professor
Ou Zheng
Software Engineer
Our Performance.
Accuracy
Scalability Level
Robustness
OUR Example
What we've done for safety